Polymer Actuators
DIELECTRIC ELASTOMER ACTUATORS
In nature, muscles allow us to lift heavy objects, travel great distances, and accomplish detailed work such as sculpting and painting. To design artificial muscles that surpass (or at least mimic) those found in nature, we must first develop materials that efficiently convert electrical energy into mechanical work while also being intrinsically soft, flexible, and strong.
Dielectric elastomers are a class of compliant capacitors that, when subjected to electric fields, convert electrical energy into mechanical work. Current dielectric elastomers are capable of stretching and flexing further than natural muscles and can lift and move small objects. However, these materials have fundamental drawbacks.
They are not compliant and must be housed in rigid frames in order to operate, which means that they cannot bend and stretch around objects like natural muscles. Further, conventional dielectric elastomer devices require excessively-high voltages, which increases device complexity and limits potential applications.
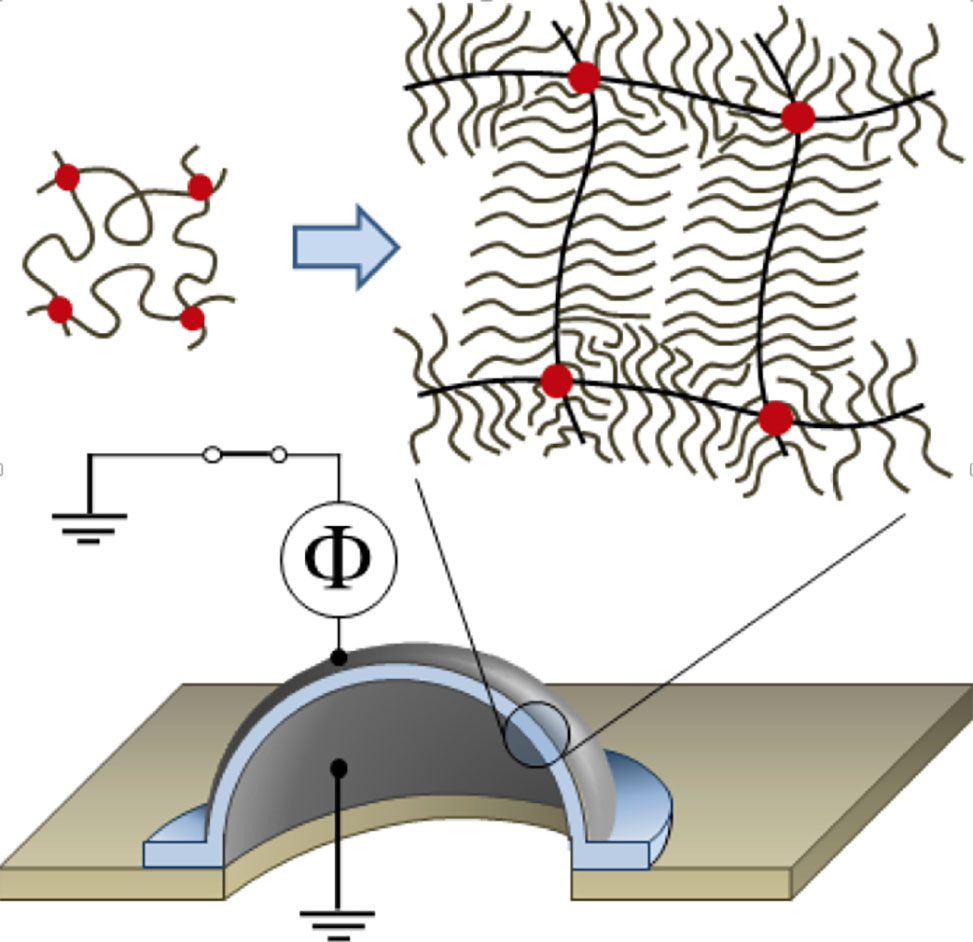
Our lab designs advanced dielectric elastomers, based on bottlebrush network architectures that actuate at low applied electric fields and without the need of rigid-frame housing. Brush-like networks allow accurate control of mechanical properties and can thus be tuned independently of their electrical characteristics. Our current work focuses on (i) developing devices that operate at extremely low voltages and (ii) incorporating novel functionalities in brush-like elastomer networks. Generally, we aim to improve dielectric elastomer performance and thereby empower unfulfilled applications such as artificial muscles, haptic displays, and energy harvesters.
Shape Shifting
Biological systems have the ability to program reversible shape changes in response to cues from their environment. While a variety of adaptive and stimuli-responsive materials like hydrogels, liquid crystalline elastomers, and shape memory materials have been developed, mimicking programmable behavior in a reversible way remains elusive.
Work published in Macromolecules by the Sheiko and Ashby groups, in collaboration with the University of Connecticut, Brookhaven and Oak Ridge National Labs, has shown that semi-crystalline elastomers may undergo reversible switching between well-defined shapes without applying any external forces. This behavior stems from the correlated interplay between a crystalline scaffold and a network of chemical crosslinks, each capable of encoding a distinct shape. The universal mechanism of reversible shapeshifting affords interesting opportunities for minimally invasive surgery, shape programmable biomedical implants, surgical sealants, and hands-free packaging.