Shapeshifting Materials
TIME-PROGRAMMABLE AND REVERSIBLE SHAPESHIFTING
Encoding the temporal evolution and reversibility of shape transformation is vital for minimally invasive surgery, drug release, and soft robotics. However, shapeshifting materials to date are irreversible and/or require external triggers, such as temperature, pH, light, chemicals, and sound. This conventional prerequisite limits viability in closed or inert systems and thus presents the need to develop materials that can change shape autonomously and in accordance with pre-determined rates and sequences.
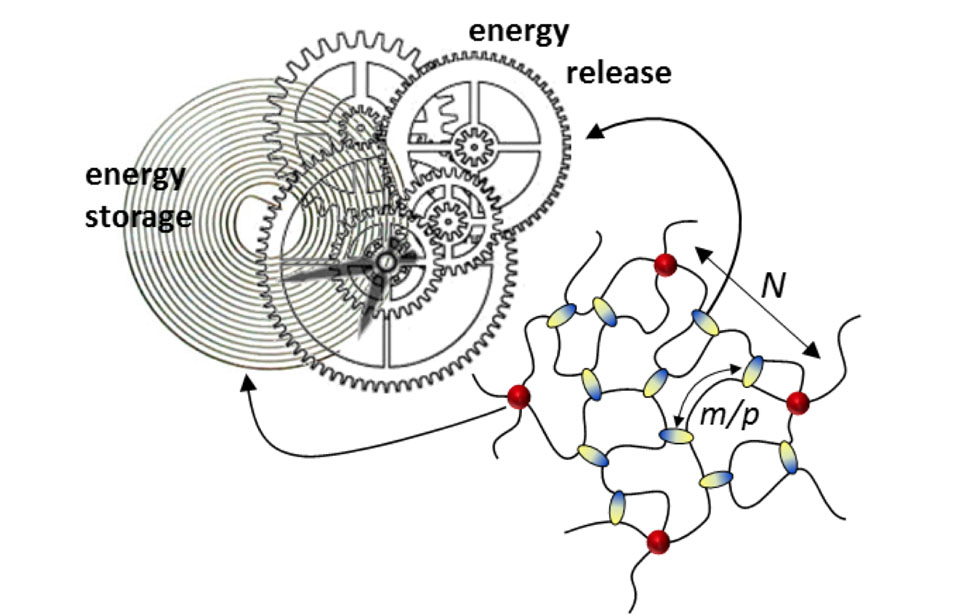
Inspired by a mechanical watch, which functions via built-in springs (energy-storage) and gears that regulate its rate of unwinding (energy release), members in our group recently designed dual networks that perform pre-determined, chronological actions under constant environmental conditions and on timescales from seconds to hours. The first network, covalently crosslinked, stores elastic energy when deformed — i.e., harnesses tension that can be translated into subsequent movement.
The second network, constituted by more temporary bonds, regulates the energy-release rate and enables sequential and reversible shapeshifting.
This approach allows for the assembly of individually-programmed “Lego” blocks, and therefore for the creation of complex systems with synchronized motion of interchangeable parts. For example, we created a synthetic flower that blooms autonomously, with each petal unfolding at a pre-determined time.
This generalizable mechanism for programming trigger-free shapeshifting opens new design avenues and, combined with the recent developments in 3D printing, will empower time- and route-programmable materials with great potential in biomedical engineering applications.
Reversible Shape-Shifting
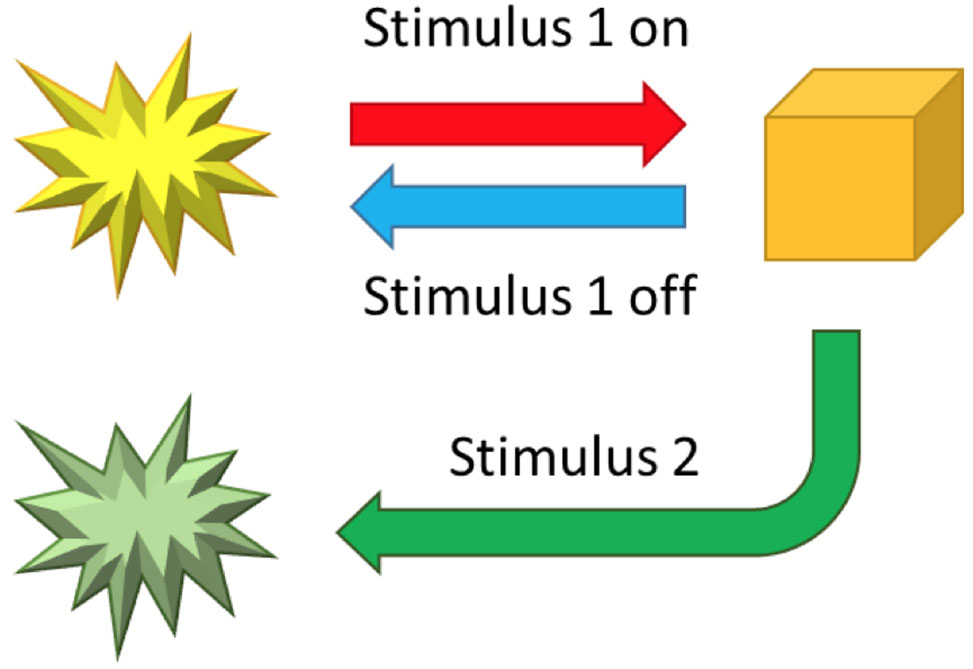
Significant advancements have been made in the design of polymeric materials, which alter shape upon external stimuli with potential applications in robotics, biomedical engineering, and optical devices. Especially promising is the recent progress in reversible shape-shifting. This review article highlights recent developments in reversible actuation of complex shapes under different stimuli, introducing novel mechanisms, materials, and applications for both one-way and two-way reversible shape memory.